Blade [time] sensor
The
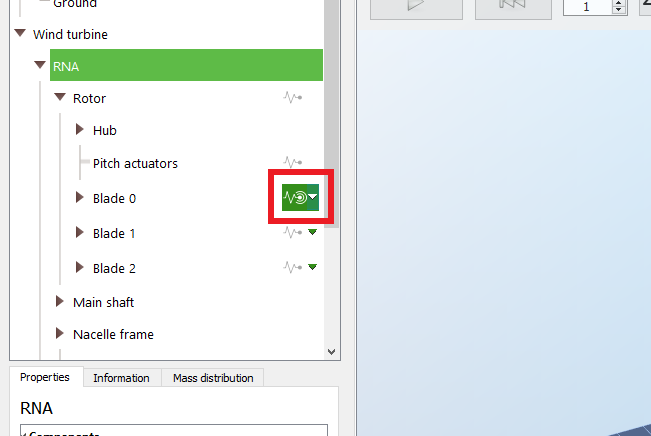
Blade sensor [time series] can be added by clicking the sensor icon in the blade part, as shown in the following picture:
Another type of blade sensor can be added: the
Blade [Span] sensor
The
Blade [Time series] sensor provides the following fields:
| Field | Unit | Description |
| Root force (magnitude) | N | Magnitude of the reaction force at the root of the blade. |
| Root moment (magnitude) | Nm | Magnitude of the reaction moment at the root of the blade. |
| Root moment (out-of-plane) | Nm | Moment at the root of the blade around the y-axis. Note that this axis does not pitch with the blades, i.e. it remains unchanged when the blades are pitched. |
| Root moment (in-plane) | Nm | Moment at the root of the blade around the x-axis. Note that this axis does not pitch with the blades, i.e. it remains unchanged when the blades are pitched. |
| Root moment about shaft | Nm | Moment at the root of the blade around the axis of the shaft. If the cone angle set in theRotor part is 0, this will be equal to the in-plane root moment. |
| Pitch angle | deg | The pitch angle of the blade. If the Rotor Actuator mode parameter is set to No structural pitch, then the demanded pitch is displayed (and not the structural pitch) . See the Pitch actuators part for more info. |
| Tip deflection (out-of-plane) | m | Out-of-plane displacement of the Blade aerodynamical station at the tip. Note: Only active (relevant) when the Analysis parameter Rotor model is set to Flexible. |
| Tip deflection (in-plane) | m | In-plane displacement of the Blade aerodynamical station at the tip. Note: Only active (relevant) when the Analysis parameter Rotor model is set to Flexible. |
| Root torque | Nm | Bending moment (torque) at the root of the blade around the pitch axis. Note: Only active (relevant) when the Analysis parameter Rotor model is set to Flexible. |
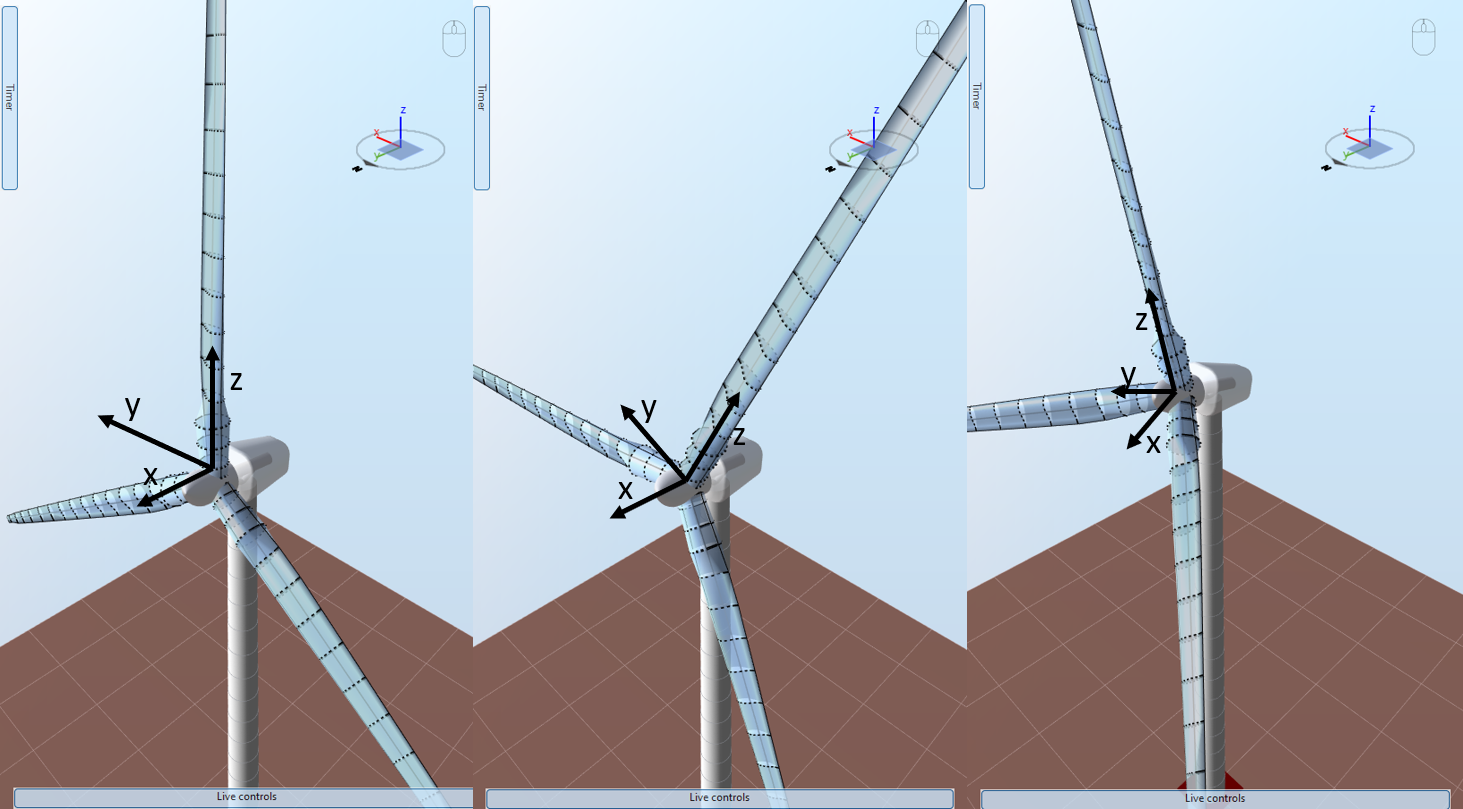
The coordinate system associated with the blade is illustrated in the three images below. This is convenient to understand what the directions of application of the
In-plane
and
Out-of-plane bending moments. In this coordinate system, the z-axis corresponds to the
Pitch axis. The x-axis is perpendicular to the z-axis and
Out-of-plane. The y-axis completes the cartesian coordinate system and will be
In-plane.
Note that the coordinate system follows the
Pitch axis, so it rotates with tilt and cone angles. However, it does not pitch with the blades. Therefore, the x-axis will always be
Out-of-plane and the y-axis will always be
In-plane.
Note on the sign of the root torque: the root torque is the response torque at the root of the blade along the pitch axis, and the positive direction goes from the root to the tip. In the example illustrated by the figure below, we apply a torque at the tip of the blade in the z-direction (corresponding to the pitch axis in this simulation) and positive in the positive z-direction. The response torque will therefore be negative in the z-direction, and the
root torque sensor will have a negative value.