RNA
Components
Configuration
Choose the configuration to be used for the RNA only template.
This parameter is only visible for the RNA only template, i.e. when there is no support structure (tower).
The use case for the No nacelle frame option is typically rotor design where the details of the Nacelle frame are not (yet) of interest.
The use case for the Fixed Rotor option is typically to investigate a (single) blade as it would be tested in the lab, e.g. static deflection, eigen frequencies.
Options:
Full RNA (default):
All parts of the RNA are included.
No nacelle frame:
All parts of the RNA except the Nacelle frame.
Fixed Rotor:
The RNA consists of only the Rotor, and the rotor is fixed (it cannot rotate).
Scaling factor
The geometry of the RNA defined by parameters unless overridden at sub parts.
- Default value: 1
- Unit: —
- Range: 0.001 — 1000
Generator
Choose what kind of generator (in particular its torque characteristic) the wind turbine has, or choose
None
if it doesn't have a generator at all.
Options:
None:
There is no generator. This is only interesting as a theoretical exercise.
Variable speed (default):
This generator operates on the whole RPM range. Most modern, utility scale WTs are variable speed, pitch regulated (VSPR). Power electronics are required for this kind of generator (however, no power electronics is explicitly included in our model). The torque vs. rpm curve is specified by parameters. There are several different types of variable speed generators, e.g. DFIG (doubly fed induction generator) and FRC (fully rated converter).
Induction:
Induction generator, often called asynchronous generator. The torque is found as: T = a·RPM + b. Induction generators used to be the dominating generator type for wind turbines.
PMSG radial:
Radial Permanent magnet synchronous generator off-grid intended for detailed design and simulation of a "hand-built" student project generator (e.g. used at NTNU in Trondheim).
PID controller:
The torque is controlled with a PID controller with the goal of keeping a set rotational velocity (RPM) of the generator. Note: if the wind turbine has a gear box, the generator rotational velocity is the rotor rotational velocity times the gear ratio.
Live:
The torque is controlled by you (the user) by using the Gen. torque field in the Live window (at the lower edge of the visualization window).
Bladed DLL:
The generator torque is controlled by an external Bladed DLL file
Python script:
The generator torque is controlled by an external Python script
Fixed torque:
The generator has a fixed torque (independent of time and RPM).
Quadratic torque:
Generator with torque that is a quadratic variable of RPM.
Transmission
Choose what kind of transmission the wind turbine has.
Options:
Geared (default):
The wind turbine has a gear box that increases rotational velocity by the gear ratio.
Direct drive:
There is no gearbox and that the generator speed is equal to the rotor speed.
Demanded pitch scheme
Choose how the demanded (collective) pitch of the blades is controlled (found). Called demanded because it is NOT necessarily the actual (physical) collective pitch, but rather what the pitch angle the pitch actuator system tries to get to.
Pitch systems are used in most modern, utility scale wind turbines. The purpose of the blade pitch is (mechanical) power control, i.e. to limit the mecanical power transfered from the wind to the rotor. The blades are pitched by so-called actuators that applies a torque to the blade root.
For fixed pitch, the power is limited by stall (sudden loss of lift). A stall controlled wind turbine has no pitch control software. Stall control was the standard for utility size wind turbines until around 2005.
For pitchable blades, the blades are collectively pitched (twisted) to limit the power from the rotor. The appropriate pitch is computed by software (i.e. control system), and in Ashes there are three ways to control the demanded pitch with software: built-in PID controller, a Bladed-style DLL, or a Python script.
Finally, it is possible for you (the user) to set the demanded pitch angle explicitly during the simulation by using the Live option.
Options:
Fixed:
Passive control. The blades are bolted to the hub and thus have a fixed pitch. The pitch angle is change in
Analysis parameters | Initial conditions.
PID controller (default):
The built-in PID controller is used.
Live:
The collective demanded blade pitch is set by you (the user).
Bladed DLL:
Use control from external file. Can be DLL or python script. The file must be chosen by clicking the action button. If there is no external file chosen, then there is no blade pitch system (i.e. it is Fixed).
Python script:
Use a Python script
Yaw scheme
Choose how the RNA yaw is controlled.
When using the RNA only template, the Has nacelle frame? parameter is active (and relevant). If the Has nacelle frame? parameter is un-checked (false), then Yaw scheme is not used - the yaw scheme used is always Fixed, even if set otherwise.
Options:
Fixed (default):
The RNA yaw is fixed (constant). No control system for yaw.
PID controller:
Active control. A PID control system sets the RNA yaw.
Bladed DLL:
Usa a Bladed DLL to control yaw angle.
Python script:
Use a Python script.
Free:
The RNA is free to yaw (rotate) relative to the tower, but the rotation is not controlled. Use cases: 1) Study and testing, 2) Simulation of broken yaw motor and no yaw breaks applied.
Geometry
Base height
The height of the base of the RNA above the ground. This is only relevant for the RNA only template as it does not have a support structure.
- Default value: 150
- Unit: $\text{m}$
- Range: -1000 — 1000
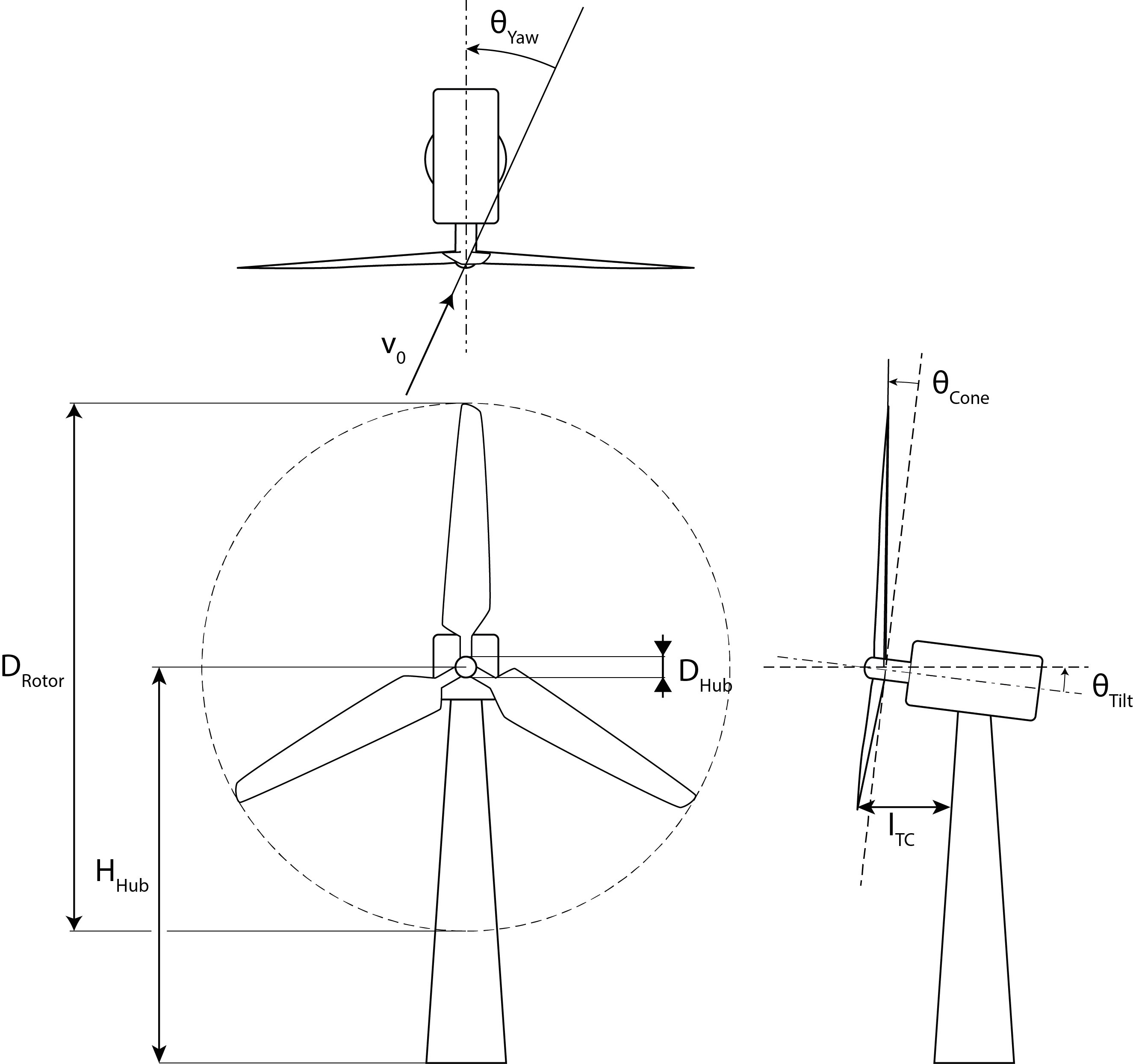
Tilt angle
The tilt angle of the main shaft, and hence the rotor plane normal.
See figure 1 below for an illustration of the tilt angle
- Default value: 5
- Unit: $°$
- Range: -90 — 90
Type
Choose the type of this RNA, either upwind or downwind.
Options:
Upwind (default):
The rotor is placed upwind of the tower. This is the default option.
Downwind:
The rotor is placed downwind of the tower.